在SMT机器的核心部分,您将找到SMT贴装头,这是负责在印刷电路板(PCB)上精确放置电子元件的复杂机械部件。在这份全面指南中,我们将深入研究SMT贴装头的构成和功能,探讨各种类型、它们的关键元素以及它们如何提高SMT工艺的效率和可靠性。
1. SMT贴装头简介
从概念上看,SMT贴装头是一个智能机械臂,类似于机器人手。
它在程序控制下自动校正位置,根据需要拾取元件,并将它们精确放置在PCB上的预定义焊盘上,完成3D往复运动。这使其成为拾取和放置机器的最复杂和关键部分之一。
SMT贴装头包括吸嘴、视觉校准系统和传感器等多个组件。
2. SMT贴装头的类型
SMT贴装头主要分为单头和多头两种类型。
多头SMT贴装头可以进一步分为固定式和旋转式。在电子制造的早期,单头机器使用了机械对准机构来放置元件,然后向供料器发出信号释放下一个元件。然而,这一过程速度较慢,每次放置元件需要1秒钟。
为了提高放置速度,制造商开始采用多头解决方案,使用多个贴装头来加速工序。这些先进的机器采用了光学对准方法,顺序拾取并放置元件在PCB上。目前,这些机器可以每小时放置多达3万个元件,既高效又经济。
一些机器甚至采用了旋转多头结构,将放置速度提高到每小时4.5万到5万个元件。
3. SMT贴装头的组成
SMT贴装头主要由两个关键组件组成:吸嘴和视觉校准系统。这些组件在电子部件在PCB上的准确和高效放置中起着关键作用。
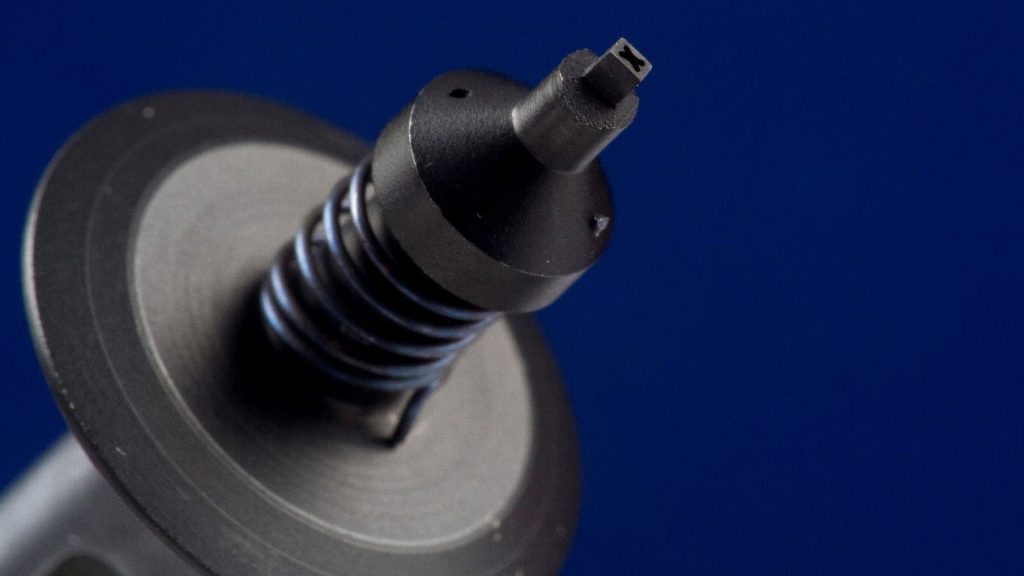
3.1 吸嘴
SMT贴装头的末端是由真空泵控制的吸嘴,即贴装工具。不同形状和大小的元件通常需要不同的吸嘴来拾取和放置。真空会产生负压,将SMD元件从进料系统(如散装料仓、管式供料器、带状或托盘包装)吸出。当使用吸嘴拾取元件时,必须确保一定的真空度,以确保所选元件正常工作。如果元件是垂直放置,或者由于“气缸”问题而不能吸出时,贴装机会触发警报。有两种主要的放置元件的方法。一种方法是基于元件的高度,即预先输入的元件厚度。当贴装头降至这个高度时,真空被释放,元件被放置在焊盘上。然而,由于元件或PCB的厚度差异,这种方法可能会导致早期或迟贴的问题,严重时可能导致元件位移和缺陷。另一种更高级的方法是基于元件与PCB接触的瞬态响应,在压力传感器的作用下实现软着陆。这种方法使放置更加容易,减少了位移和缺陷的风险。
吸嘴是直接接触零件的组件。为适应不同元件的放置,许多SMT机器配备了更换吸嘴的机制,吸嘴和吸油管之间还设有弹性补偿和缓冲结构,以保护在元件放置过程中保护机器。
3.2 视觉校准系统
随着电子产品越来越需要小型化、轻薄化和高可靠性,仅通过精确放置小间距元件才能保证表面贴装的可靠性。为了准确安装细间距元件,需要考虑以下几个因素:
3.2.1 PCB定位错误
PCB上的电路图案通常不总是与PCB上机械孔和边缘的精确对应,这会导致放置错误。此外,PCB上的图案可能会变形,PCB本身可能会弯曲,进一步增加了放置错误的可能性。
3.2.2 元件对齐错误
元件的中心线未必总是与所有引线的中心线相对应。此外,当贴装系统使用机械对准爪对元件进行对准时,可能无法保证元件的所有引线的中心线都对齐。此外,在包装容器内或在使用对准爪进行对准时,元件引线可能会变弯、扭曲、重叠等,即引线失去同平面性。这些问题将导致放置错误和降低放置可靠性。为了成功进行表面贴装,重要的是元件引线偏离焊盘的距离不超过引线宽度的25%。引线间距较窄时,允许的偏差更小。
3.2.3 影响放置精度的机械因素
影响放置精度的机械因素包括贴装头或PCB定位台的X-Y轴运动精度、元件对准机构的精度和视觉系统的放置精度。视觉系统已成为高精度贴装机的重要组成部分。
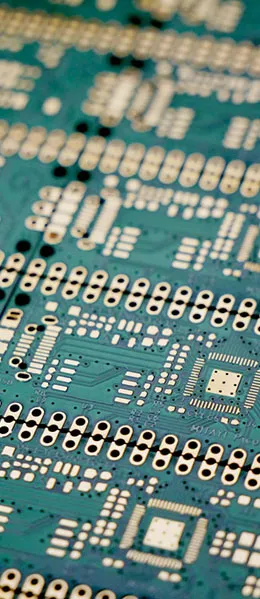
机器视觉系统由硬件和软件两部分组成。摄像头充当视觉系统的图像传感器,通常采用固态摄像头。这些摄像头主要由集成电路构成,其中CCD阵列由众多小型、精密的光敏元件组成。每个光敏检测元件输出的电信号与观察目标上相应位置发出的光的强度成正比,电信号记录为该点的灰度值。点坐标确定了图像中点的位置。摄像头采集的大量信息由微型计算机进行处理,处理结果显示在监视器上。摄像头通过通信电缆与微处理器、执行器和显示器相连。
影响视觉系统精度的主要因素是摄像头元件的数量和光学放大倍率。摄像头元件数量越多,精度越高。此外,较高的光学放大倍率会提高精度。